KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24지구 관측 인공위성의 촬영 임무를 위해서는 정교한 자세 유도 명령이 필요한데, 안정적고 효과적인 관점에서 성능을 향상시키는 효과적인 알고리즘을 개발하였다.
인공위성은 일상생활에서 매우 다양한 혜택을 제공한다. 인터넷, 전화, TV 방송과 같은 서비스를 전 세계적으로 제공하며, 항공기, 드론, 자율주행 차량을 포함한 다양한 시스템의 위치 정보를 제공기도 한다.
인공위성 기술의 핵심 응용 중 하나는 영상 데이터를 제공하는 것인데, 이러한 영상 데이터는 농업 및 산림 관리, 해양 및 환경 변화 모니터링, 국가 방위와 안보를 위한 중요한 정보를 제공하는 데 필수적인 역할을 수행한다.
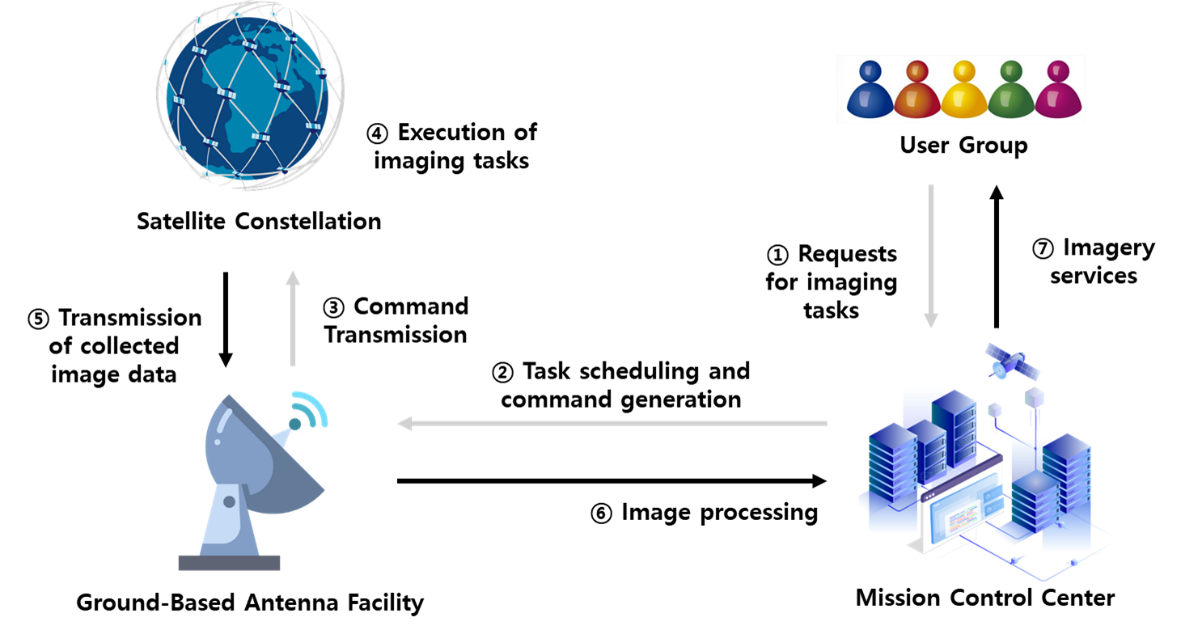
인공위성에서 영상 데이터를 획득하는 과정은 그림1과 같이 여러 단계가 포함되어 있다. 먼저 관측 지점을 정의하고 여러 관측 지점에 대한 촬영 순서를 결정한다. 이후, 명령 데이터를 생성하여 인공위성이 지정된 목표를 촬영할 수 있도록 하고, 이 데이터는 지상의 안테나를 통해 인공위성에 전송된다. 인공위성이 데이터를 수신하면 목표 지점에 맞춰 회전한 뒤 필요한 영상을 촬영하고, 촬영한 데이터를 지상국으로 전송한다. 지상국에서는 이 데이터를 처리하여 사용자에게 전달한다.
목표 지점을 정확히 촬영하기 위해 명령 데이터에는 인공위성의 특정 시간 내 요구되는 자세를 지정하는 자세 유도 프로파일이 포함될 수 있다. 정확한 시간에 영상을 촬영하려면 인공위성의 높은 공전 속도(초속 7km 이상)와 지구의 자전을 고려한 정밀한 위치 예측이 필요하다. 또한, 위성 카메라에 태양빛이 직접 들어오는 것을 피하거나, 촬영 중 지상국과의 통신을 유지하는 등의 추가 조건도 고려해야 한다.
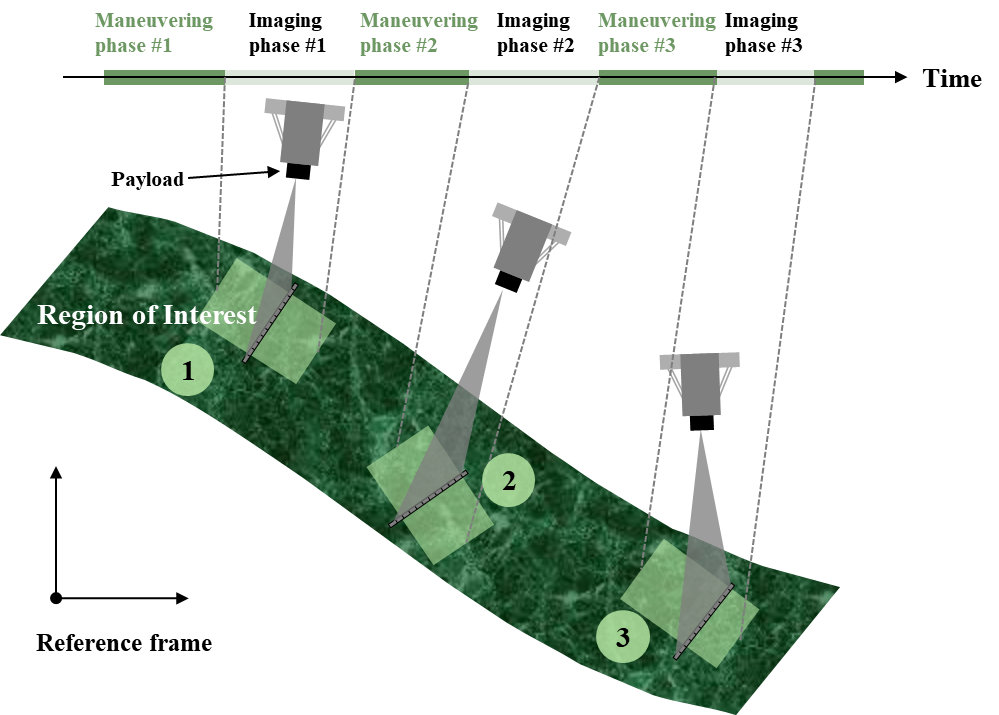
또한, 인공위성의 높은 공전 속도로 인해 특정 지역을 통과하는 시간이 매우 짧기 때문에, 다른 목표 지점을 촬영하기 위해서는 빠른 자세 기동이 필요하다. 이는 제한된 시간 내에 여러 목표의 고품질 이미지를 확보하기 위해 필수적인 기술이다.
정확하고 빠른 회전과 안정화를 위해서는 자세 기동 유도에 대한 고급 계산이 필요하다. 이러한 계산에서는 비영점 경계 조건(각속도 조건)과 인공위성의 하드웨어 제한 사항(최대 각속도 및 각가속도)을 동시에 고려해야 한다. 따라서, 이러한 제한 사항을 준수하면서 신속한 기동을 가능하게 하는 알고리즘의 개발이 지구 관측 인공위성에서는 중요한 기술이다.
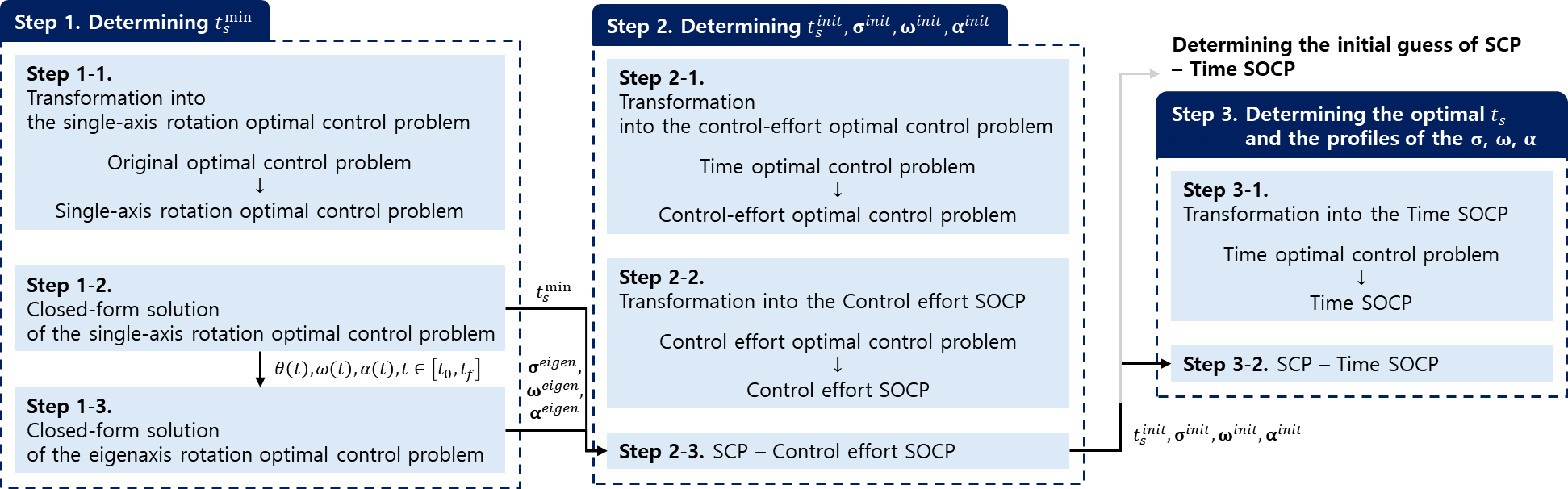
이 문제를 해결하기 위해 이동헌 교수 연구팀은 안정적이고 효율적인 자세 기동 명령을 계산할 수 있는 알고리즘을 개발하였다. 이 알고리즘에서는 시간 제약, 하드웨어 제한 조건, 관측 요구 사항을 고려하였고, 관측 기간 동안에는 목표를 인공위성의 진행 방향에만 제한하지 않고 임의의 방향으로 촬영할 수 있도록 유도 프로파일 알고리즘이 고안되었다. 관측 기간 사이에는 그림 2와 같이 인공위성의 각속도 및 하드웨어 제약 조건을 준수하면서 빠른 기동을 가능하게 하는 수치적 자세 유도 프로파일 알고리즘이 구현되었다. 또한, 특정 상황에서는 수치 계산 없이 자세 유도 프로파일을 생성할 수 있는 해석적 솔루션이 개발되었다.