KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2026 Vol. 26KAIST 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 새로운 모핑형 유연 구동기를 개발했다. 새로운 기능과 함께 고변위, 고출력의 우수한 성능을 가지는 모핑형 구동기의 개발은 사람과 기술이 상호작용하는 새로운 방식을 제안하였다.
KAIST 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 모핑 구동기를 개발하였다.
현대 기술은 2차원 화면을 넘어 3차원 형상을 통해 정보를 전달하는 새로운 방식을 탐구하고 있다. 그러나 3차원 형상을 빠르게 표현하고, 다른 형상으로 재구성하는 것은 도전적인 과제이다. 이에 대한 해답으로, 경기욱 교수 연구팀은 지난 9월 전기활성 고분자의 일종인 PVC 젤, 유전성 유체, 패턴화된 전극으로 구성된 새로운 모핑 구동기를 선보였다.
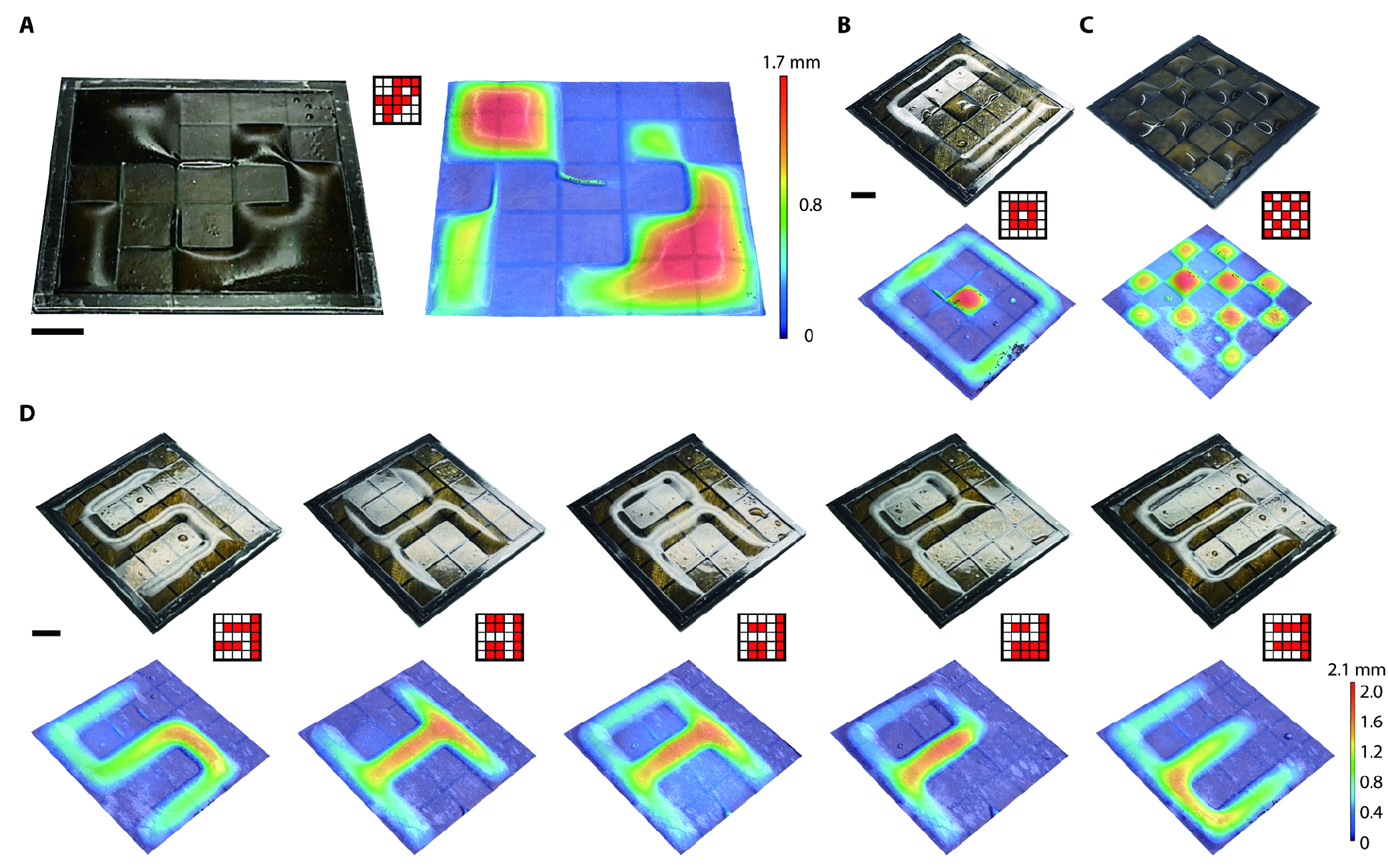
연구팀이 개발한 모핑 구동기는 전기유압식 구동 원리를 이용한다. 구동기에 전압을 인가하면 PVC 젤 복합체가 전극에 달라붙는 정전기적 지핑이 발생한다. 정전기적 지핑을 국부적으로 제어함으로써 내부 유체의 분포를 자유롭게 조절할 수 있다. 정전기적 지핑의 결과로 내부 유체의 유압에 의해서 PVC 젤 복합체가 변형됨에 따라 모핑형 구동기는 그림 1과 같이 다양한 3차원 형상으로 변화한다. 구동 전압의 시퀀스 디자인을 통해 내부 유체의 흐름을 제어하면 영상1과 같이 모핑 표면의 동적 움직임을 구현할 수 있다.
연구팀의 모핑 구동기는 반응속도, 출력 변위, 그리고 출력 힘 측면에서 매우 우수한 성능을 보인다. 1.5 mm의 얇은 두께와, 7 g의 가벼운 무게를 가지면서도 최대 2.5 mm의 수직 변위와 2.0 N의 힘을 출력할 수 있으며, 약 0.045 초 만에 형상을 표현할 수 있다. 또한 기존의 모핑 구동기가 제공할 수 없었던 풍부한 햅틱 피드백을 제공하며, 모양 변화 특성을 활용하여 영상 2와 같이 구동기의 표면에서 물체를 이동시킬 수 있다.
해당 연구는 모핑 구동기의 개발을 통해 사람과 기술이 상호작용하는 새로운 방식을 제안하였으며, 이는 차세대 디스플레이 및 로보틱 인터페이스 등 다양한 방식으로 활용될 것으로 기대된다.
장승연 박사과정 학생이 제1 저자로 참여하고 ETRI와 공동으로 진행한 이 연구는 국제학술지 ‘사이언스 어드밴시스 (Science Advances)’ Vol.10 에 게재 및 Headline article로 소개되었다. (논문명: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator. 링크: https://www.science.org/doi/full/10.1126/sciadv.adq2024)




