KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24RootBot: Root-inspired soft-growing robot for high-curvature directional excavation
A RootBot, a soft-growing robot inspired by plant roots, has been developed for the high-curvature ground excavation. Its innovative design allows efficient steering and soil removal within constrained spaces. RootBot is expected to bring a paradigm shift in landscapes of urban infrastructures and various engineering practices.
Biomimetics, the art of drawing innovation from nature's design, is evolving to meet urban challenges. With cities expanding, the demand for precise tunneling in complex underground networks has never been more critical. A collaborative research team led by Prof. Jee-Hwan Ryu and Tae-Hyuk Kwon in the Department of Civil and Environmental Engineering at KAIST has introduced a RootBot, an excavation robot inspired by plant roots, promising transformative advancements in urban engineering. This soft-growing marvel uses its root-inspired design to navigate subterranean landscapes in rapidly evolving cities.
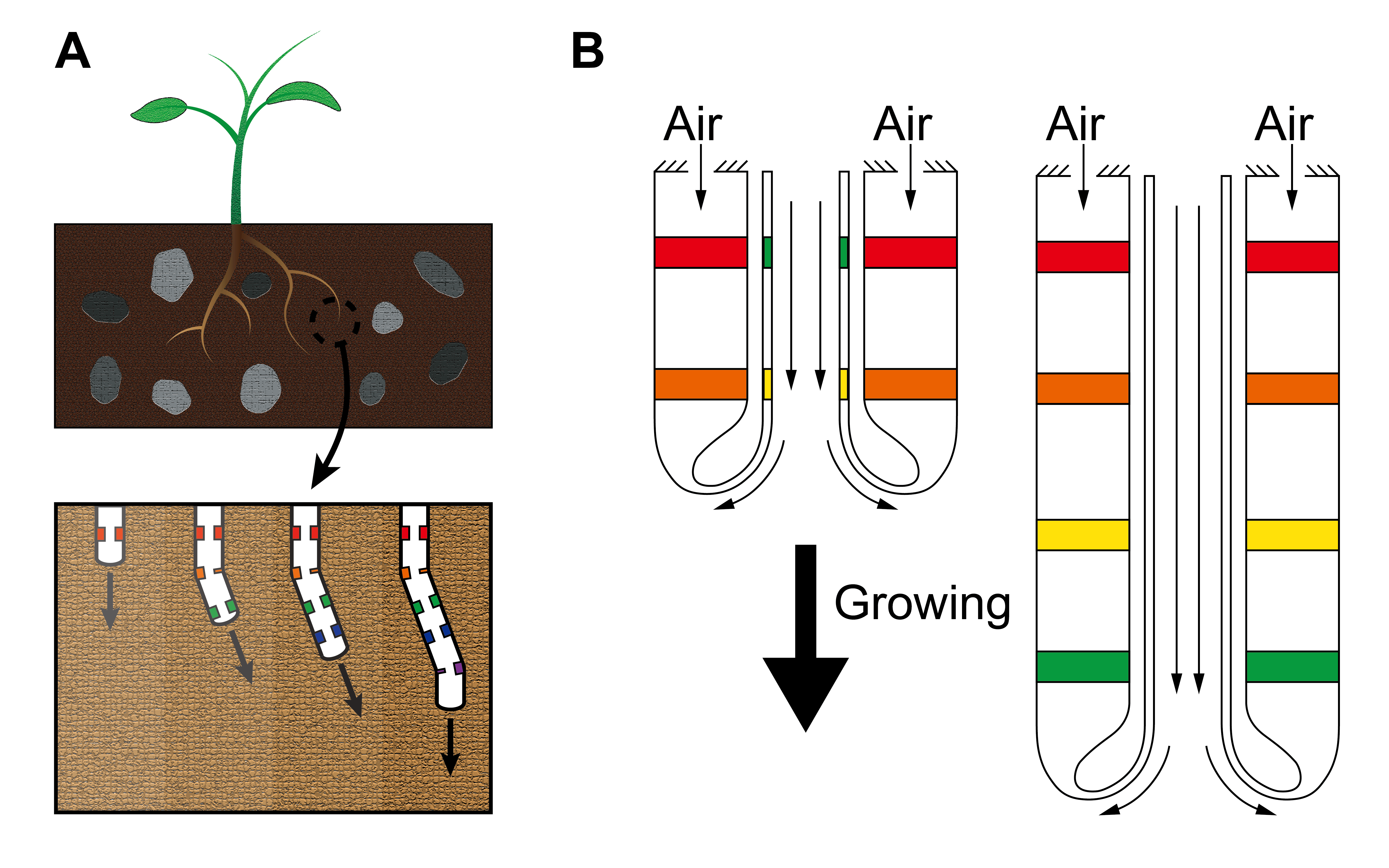
In the intricate world of plants, roots stand out for their ability to navigate obstacles and seek nutrients, as illustrated in Fig. 1A. The growth of plant roots involves three key mechanisms: cell differentiation, elongation, and division. RootBot, the soft-growing excavation robot, strategically emulates the propulsion mechanism of plant roots, initiating its journey with an inflated soft plastic tube propelled by air pressure (Fig. 1B). This unique locomotion, driven by growth, sets RootBot apart from conventional excavation systems and offers unparalleled flexibility in navigating diverse distances and intricate routes.
RootBot, with its plant-inspired ingenuity, shows promise for meticulous excavation in confined spaces. In mock-up experiments, the prototype exhibited a speed of 0.82 mm/min in wet-compacted sand and showcased adept steering at high curvature. The potential applications include directional excavation, precise soil removal in confined spaces, and adept navigation through intricate, curved routes to overcome unforeseen underground obstacles. This work has been featured in Acta Geotechnica (Han et al. 2023).
Han, G., Seo, D., Ryu, JH. et al. RootBot: root-inspired soft-growing robot for high-curvature directional excavation. Acta Geotech. (2023). https://doi.org/10.1007/s11440-023-02073-2
Most Popular

When and why do graph neural networks become powerful?
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more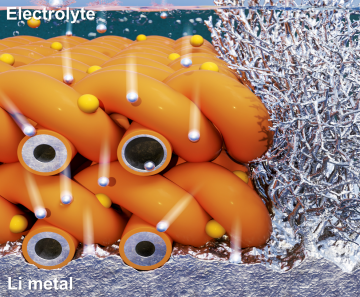
Extending the lifespan of next-generation lithium metal batteries with water
Read more
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Oxynizer: Non-electric oxygen generator for developing countries
Read more