KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Professor Ki-Uk Kyung's research team has developed a novel soft shape-morphing actuator capable of rapidly transforming into various 3D shapes. This actuator, featuring new functionalities along with exceptional performance in output displacement and force, introduces an innovative way to interact with technology.
Professor Ki-Uk Kyung’s research team in the Department of Mechanical Engineering at KAIST has developed a morphable soft actuator capable of rapidly changing into various 3D shapes.
Modern technology is exploring new ways to convey information through three-dimensional forms, going beyond the conventional two-dimensional screens. However, quickly expressing and reconfiguring 3D shapes remains a challenging task. As a solution, the research team introduced a novel shape-morphing actuator made of PVC gel, dielectric liquid, and patterned electrodes.
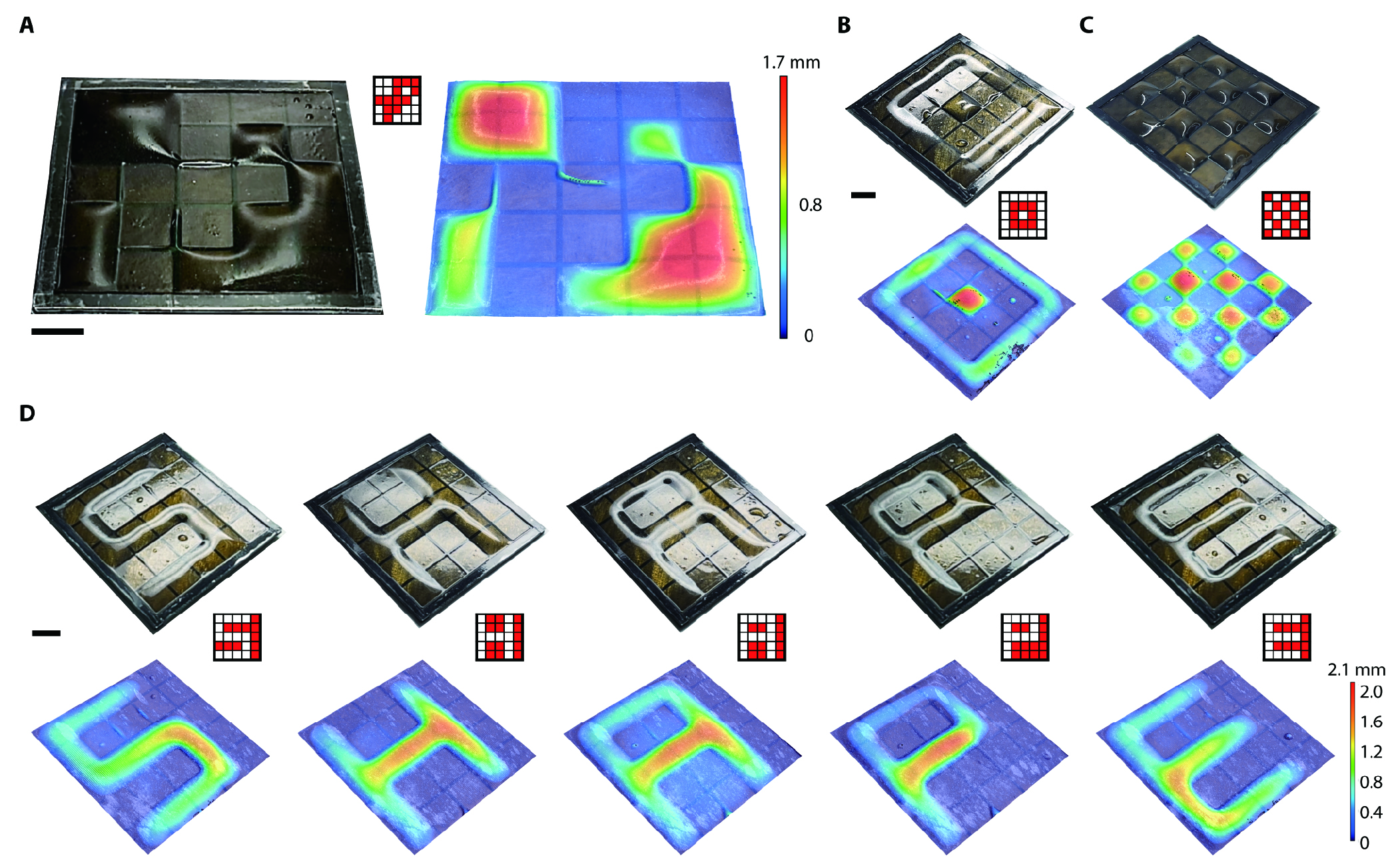
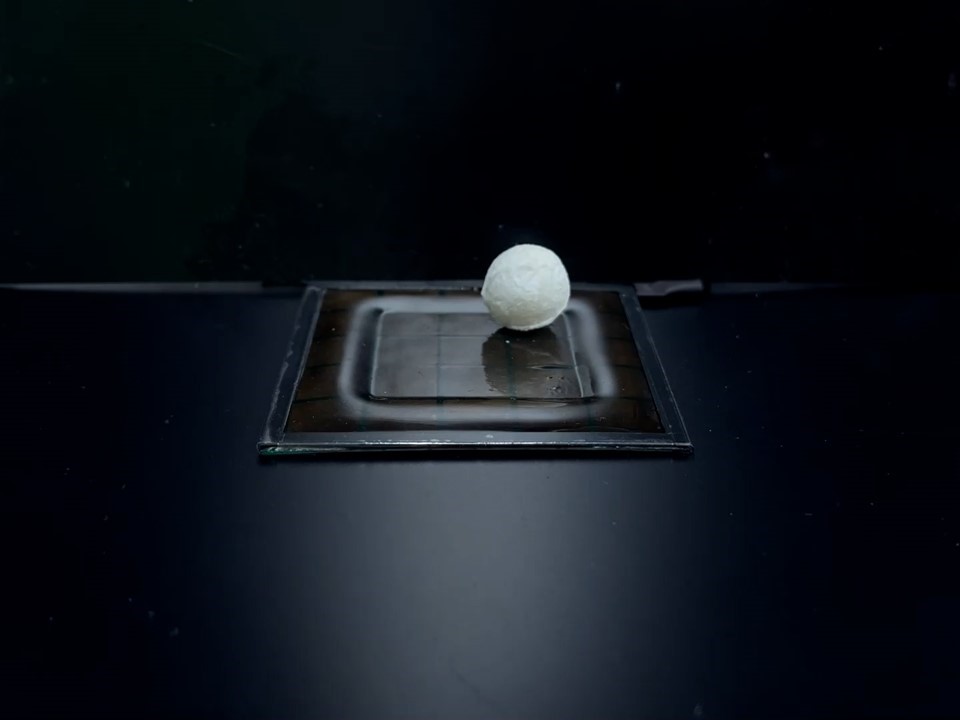
The developed morphable soft actuator operates on the principle of electrohydraulic actuation. When voltage is applied to the actuator, electrostatic zipping occurs as the PVC gel composites adhere to the electrode. By locally controlling electrostatic zipping, the distribution of the internal liquid can be freely adjusted. As a result of the electrostatic zipping, the hydraulic pressure of the internal liquid deforms the PVC gel composite, enabling the actuator to transform into various 3D shapes, as shown in Figure 1. By designing the voltage sequence, the liquid flow can be manipulated, allowing the dynamic motion of the morphing surface to be realized, as demonstrated in Movie 1.
The developed morphable soft actuator operates on the principle of electrohydraulic actuation. When voltage is applied to the actuator, electrostatic zipping occurs as the PVC gel composites adhere to the electrode. By locally controlling electrostatic zipping, the distribution of the internal liquid can be freely adjusted. As a result of the electrostatic zipping, the hydraulic pressure of the internal liquid deforms the PVC gel composite, enabling the actuator to transform into various 3D shapes, as shown in Figure 1. By designing the voltage sequence, the liquid flow can be manipulated, allowing the dynamic motion of the morphing surface to be realized, as demonstrated in Movie 1.
The developed shape-morphing soft actuator exhibits exceptional performance in response speed, output displacement, and output force. With a thin profile of 1.5 mm, and a lightweight structure of 7 g, the actuator can produce a maximum vertical displacement of 2.5 mm and a force of 2.0 N, achieving rapid shape transformation in 0.045 seconds. Additionally, the developed actuator delivers enriched haptic feedback beyond the capabilities of traditional morphable actuator and leverages its shape-changing capability to manipulate objects through its morphing surface, as shown in Movie 2.
Furthermore, the actuator provides rich haptic feedback that conventional soft actuators cannot provide, and its dynamic shape-morphing capabilities allow for rapid movement of objects across its surface.
This research, with Ph.D. candidate Seung-Yeon Jang participating as the first author and conducted in collaboration with ETRI, was published in Science Advances, Vol.10, and introduced as a headline article. (Title: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator. Link: https://www.science.org/doi/full/10.1126/sciadv.adq2024)
Most Popular

When and why do graph neural networks become powerful?
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more
Extending the lifespan of next-generation lithium metal batteries with water
Read more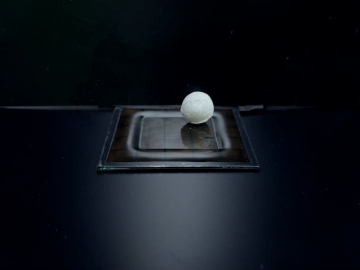
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Oxynizer: Non-electric oxygen generator for developing countries
Read more