KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24A Drone-Multileg Robot team grabs objects on ship deck for 2024 MBZIRC Maritime Grand Challenge
In this research, Professor Hyunchul Shim’s research team developed a drone-multileg robot team to retrieve objects from a ship deck on rough sea for Mohamed Bin Zayed International Robotics Challenge held in Abu Dhabi, UAE in 2024.

In Mohamed Bin Zayed (MBZIRC) Maritime Grand Challenge 2024, an international robotics competition, the competitors vying for the 2 Million Dollar Prize, are requested to develop a system to retrieve objects from a moving ship deck. As it is difficult for drones to retrieve objects due to many reasons including the constant relative motion and strong downwash of the drone that blows the object away, a novel retrieval system is needed.
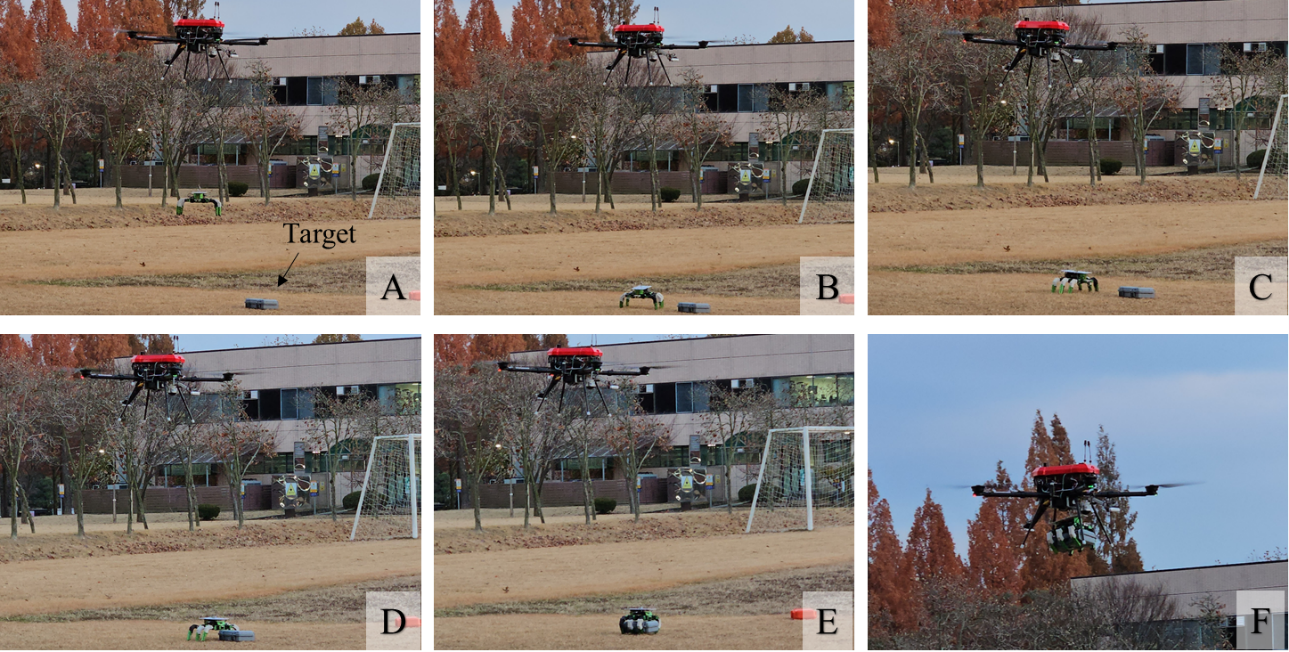
To address these limitations, Professor Hyunchul Shim’s research team developed SPIBOT system, a hexapod mobile gripper robot that is winched down from a drone. To retrieve the object, the hexapod robot is lowered from the drone and then starts searching for the object. When detected, the robot crawls over the object and grabs it using its six legs. Finally, upon detecting the case is securely held by the legs, the drone winches the robot back up.
This gripper system is the first of its kind proposed in this research, enabling effective object retrieval in dynamic environments. Inspired by spiders, SPIBOT employs a winch system to descend along a tether from a drone and execute retrieval missions. The robot uses position data from the drone to navigate toward the target and employs six articulated legs to grasp and secure objects. These legs enable stable movement across diverse surfaces and efficient grasping, significantly improving success rates compared to other drone based retrieval systems, which rely on precise drone positioning.
The tether-based design also reduces the need for drones to land, minimizing risks crashing with the superstructure of the ship and avoiding blowing the object by the downwash. SPIBOT incorporates a real-time action selection algorithm that enhances mission success rates and efficiency. The algorithm optimizes actions based on target proximity and action affordance, enabling effective execution of tasks such as alignment and grasping. Additionally, by utilizing IMU, inertial sensors and ultrasonic sensors, the system evaluates the robot's stability and grasping status in real-time. The robot repeatedly tries to grab the object until it succeeds, making the system ideal for competition
SPIBOT system was tested in diverse environments, including rivers, lakes, grasslands, and coastal areas. It also demonstrated its reliability and practicality by participating in the 2023 MBZIRC Maritime Grand Challenge where the team won second place with Professor Kim Jinhwan’s team for an object retrieval mission from a moving vessel.
This autonomous drone gripper system enhances precision and efficiency while effectively addressing the weight and reach limitations of existing approaches, such as drone-manipulator systems. The SPIBOT system presents a distinctive approach compared to conventional aerial gripper research and has been patented based on its innovative design. By addressing the limitations of conventional aerial gripper systems, SPIBOT highlights new possibilities for autonomous drones and expands the potential applications of robotic technologies in real-world scenarios.

Most Popular

When and why do graph neural networks become powerful?
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more
Extending the lifespan of next-generation lithium metal batteries with water
Read more
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Oxynizer: Non-electric oxygen generator for developing countries
Read more