KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Fall 2025 Vol. 25DreamSTEP: Pioneering a Full-Stack Autonomous Walking Robot System in Extremely Harsh Terrains
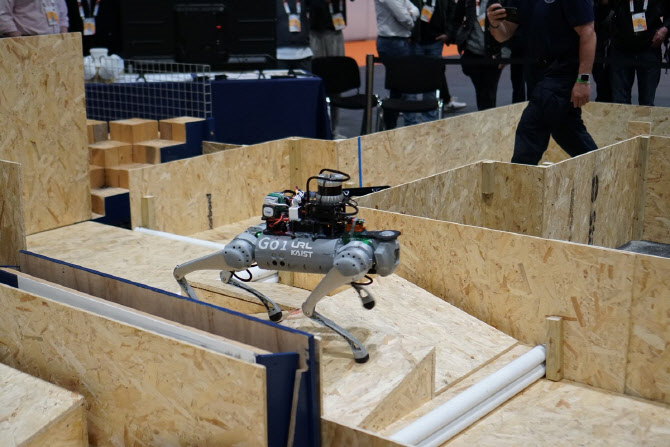
A full-stack autonomous walking system called DreamSTEP, based on the blind locomotion controller known as DreamWaQ, exhibited remarkable resilience while navigating through challenging terrains in Autonomous Quadruped Robot Challenge (AQRC) held at IEEE ICRA 2023.
The DreamWaQer, a quadruped robot built upon this system, demonstrates the ability to conquer harsh terrains and maintain robust movement even in the absence of visual sensor data or during unexpected falls.

Legged robots are designed based on the philosophy that legged animals are proficient in navigating cluttered environments. This ability opens up opportunities for legged robots to be used for applications in dangerous areas such as exploration, inspection, and disaster response. However, deployment in such extreme conditions requires high robustness of the robot’s locomotion controller.
Professor Hyun Myung’s research team in the School of Electrical Engineering at KAIST addressed this problem by developing DreamWaQ, an AI-based locomotion controller for quadrupedal robots leveraging deep reinforcement learning. The robot controlled with DreamWaQ, called DreamWaQer, can robustly walk through extreme terrains utilizing only proprioceptive measurements. The method is inspired by the fact that humans can still walk carefully with high robustness at night when it is hard to see the surroundings by sensing with their legs and body pose.
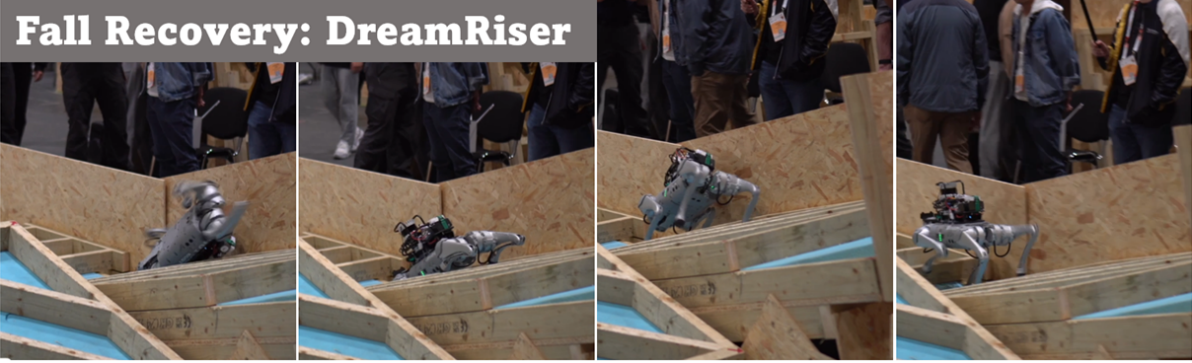
DreamWaQer was validated not only in a controlled laboratory environment but also in outdoor environments where uncertainties are more severe. A relatively small quadrupedal robot with a standing height of 30cm can swiftly overcome steps of up to two-thirds of its height. The team also found that the robot can walk stably at speeds as slow as 0.3 m/s and as fast as 1.0 m/s, regardless of the environment. The team also developed a fall recovery algorithm named DreamRiser that allows the robot to swiftly recover its pose autonomously when inevitable fall occurs.
The integration of DreamWaQ and DreamRiser offers a highly resilient quadrupedal locomotion controller. Based on this controller, the research team further built a fully-autonomous quadrupedal navigation framework, named DreamSTEP, and won the championship at the IEEE Autonomous Quadruped Robot Challenge (AQRC) hosted at the IEEE International Conference on Robotics and Automation (IEEE ICRA), the largest international conference in the field of robotics held in London, UK from May 29 to June 2, 2023. There were six teams from around the globe including MIT and CMU from USA, and IIT from Italy, participating in the semi-final and final rounds. The DreamSTEP team from KAIST scored 246 points in total by leveraging the fully-autonomous navigation system while the second-place team scored only 60 points failing to operate their robot autonomously.
The fully-autonomous navigation system is comprised of 1) Simultaneous Localization And Mapping (SLAM), 2) path planning, and 3) motion control modules. The SLAM module can build the map of the environment autonomously and localize the robot in real-time. The path planning module enables the robot to search for the safest and most efficient path to reach a specified goal point. The planned path is then sent to the controller that can accurately and robustly track the given command. This framework is essential in deploying quadrupedal robots in extreme environments where the human pilot may not be present, and teleoperation is not reliable due to poor wireless communication between the ground station and the robot.
Most Popular

Wearable Haptics of Orthotropic Actuation for 3D Spatial Perception in Low-visibility Environment
Read more
TwinSpin: A Novel VR Controller Enabling In-Hand Rotation
Read more
Soft Airless Wheel for A Lunar Exploration Rover Inspired by Origami and Da Vinci Bridge Principles
Read more
How AI Thinks: Understanding Visual Concept Formations in Deep Learning Models
Read more
Lighting the Lunar Night: KAIST Develops First Electrostatic Power Generator for the Moon
Read more