KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24Jellyfish terminator: Robot developed to exterminate aquatic pest
Jellyfish terminator: Robot developed to exterminate aquatic pest
Robo hunters efficiently terminate dangerous jellyfish.
Article | Spring 2014
A team led by KAIST Civil and Environmental Engineering Department’s Professor Hyun Myung has just finished testing the cooperative assembly robot for jellyfish population control, named JEROS, in the field.
The rising number of accidents and financial losses by fishing industry, estimated at 300 billion won per year in Korea, caused by the recent swarm of jellyfish in coastal waters has been a major problem for many years. The research team led by Prof. Hyun Myung began developing an unmanned automated system capable of eradicating jellyfish in 2009, and has since completed field-tests last year with success.
This year, JEROS’s performance and speed have been improved with the ability to work in formation as a cooperative group to efficiently exterminate jellyfish.
JEROS, an unmanned aquatic robot with a mountable grinding part, is buoyed by two cylindrical bodies that utilize propulsion motors to move forward and in reverse, as well as rotate 360 degrees. Furthermore, GIS (geographic information system)-based map data is used to specify the region for jellyfish extermination, which automatically calculates the path for the task. JEROS then navigates autonomously using a GPS (Global Positioning System) receiver and an inertial navigation system.
The assembly robots maintain a set formation pattern while calculating their course to exterminate jellyfish. The advantage of this method is that there is no need for individual control of the robots. Only the leader robot requires the calculated path, and the other robots can simply follow in a formation by exchanging their location information via wireless communication (ZigBee method).
JEROS uses its propulsion speed to capture jellyfish in the grinding part on the bottom, which then suctions the jellyfish toward the propeller to be exterminated.
The field test results show that three assembly robots operating at 4 knots (7.2km/h) dispose of jellyfish at a rate of about 900kg/h.
The research team has recently completed testing JEROS at Gyeongnam Masan Bay and is expected to further experiment and improve the performance under various environments and conditions.
The current system is designed for not so highly venomous jellyfish such as moon jellyfish (Aurelia aurita). To cope with highly venomous jellyfish, the research team is developing the next version that will transfer the chopped up bits to the surface (to be carried by the robot) rather than just shredding them.
JEROS may also be utilized for other purposes including marine patrols, prevention of oil spills, and waste removal from the sea.
JEROS research has been funded by Ministry of Science, ICT and Future Planning and Ministry of Trade, Industry and Energy.

Most Popular

When and why do graph neural networks become powerful?
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more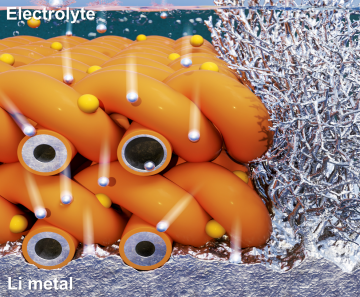
Extending the lifespan of next-generation lithium metal batteries with water
Read more
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Oxynizer: Non-electric oxygen generator for developing countries
Read more