KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2025 Vol. 24Mechanically-reinforced soft gripper for lifting extremely high payloads
Mechanically-reinforced soft gripper for lifting extremely high payloads
Prof. Ki-Uk Kyung’s research team developed a high-payload soft gripper which consists of a mechanically strengthened electro-adhesive skin and a multi-layered artificial muscle. The developed soft gripper can hold up 480 times heavier objects than the gripper’s mass.
Article | Fall 2021
Picking up and placing various objects by a robot system is one of the most important tasks for industrial applications, such as manufacturing and logistics. However, conventional grippers with hard materials have some limitations in gentle grasping. For example, with a conventional robot gripper, it is difficult to grasp brittle or very soft objects due to its rigidity. A soft gripper has been considered as a potential solution to this issue because it enables the careful grasping of objects due to the compliance of the gripper.
Although a soft gripper adapts its shape to various objects, it lacks sufficient strength to pick up heavy objects due to the softness of the gripper material. To resolve this limitation, the research team of Prof. Ki-Uk Kyung in the Department of Mechanical Engineering developed a mechanically reinforced soft gripper for extremely high-payload capability. The soft gripper can hold up an object 480 times heavier than the gripper’s mass (Figure 1).
The proposed soft gripper is composed of artificial muscle and electro-adhesive skin (Figure 2). The artificial muscle actuates the soft gripper to make contact with target objects, and it is made up of electroactive polymers (EAPs) that can be mechanically deformed with electric fields. To enhance the grasping force, the research team applied multi-layered EAPs and optimized the performance of the actuator.
The electro-adhesive skin generates a strong adhesion force between the gripper and target objects. When the driving voltage is applied to electrodes of the electro-adhesive skin, the attractive force is generated between the electrodes and induces charges in target objects. The research team designed flexible electro-adhesive skin which has a high elastic modulus compared with typical soft materials. This enables the soft gripper to have a reinforced structure without compromising the flexibility of the soft mechanism.
The soft gripper with an optimized specification is able to lift and move an object weighing 625 g, even though the gripper’s mass is only 6.2 g. Moreover, the soft gripper with a larger contact area, weighing just 35 g, is capable of holding up to 16.8 kg. This is 480 times heavier than the gripper’s mass.
The developed soft gripper can lift various shaped objects as well, including cylinders, spheres, hexahedrons, and flat shapes (Figure 3). This enables the gripper to perform various tasks without changing the robotic hand. In addition, the light weight of the gripper is expected to reduce a robot manipulator’s workload. Therefore, the proposed soft gripper can be used in various applications, including manufacturing and distribution as well as the semiconductor and space industries, where a conventional gripper or vacuum suction is challenging to apply.
The results of this research are published in Smart Materials and Structure and IEEE Trans. Industrial Electronics, which is a top-tier journal paper in the instruments fields.
This research has been supported by a Korea Evaluation Institute of Industrial Technology (KEIT) grant funded by the Korea government (MOTIE), and the Alchemist Project of Ministry of Trade, Industry, and Energy.



Most Popular

When and why do graph neural networks become powerful?
Read more
Smart Warnings: LLM-enabled personalized driver assistance
Read more
Extending the lifespan of next-generation lithium metal batteries with water
Read more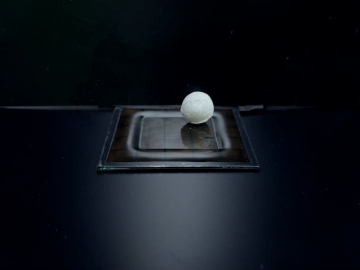
Professor Ki-Uk Kyung’s research team develops soft shape-morphing actuator capable of rapid 3D transformations
Read more
Oxynizer: Non-electric oxygen generator for developing countries
Read more