KAIST
BREAKTHROUGHS
Research Webzine of the KAIST College of Engineering since 2014
Spring 2024 Vol. 22
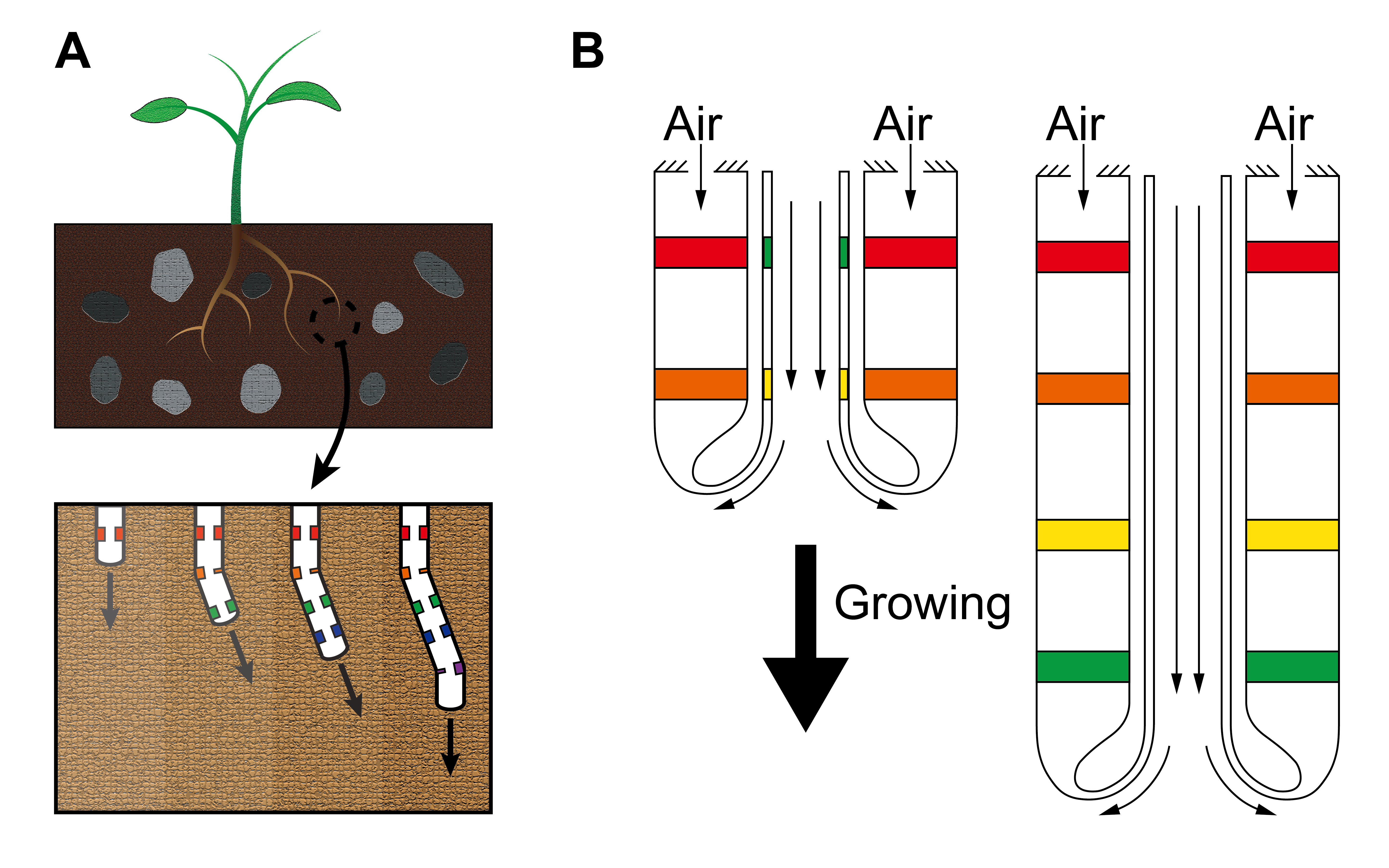
고곡률 조향 굴착이 가능하도록 설계된 식물 뿌리 모방 유연성장로봇 RootBot이 개발되었다. RootBot은 유연 로봇의 장점을 살린 디자인으로 좁은 공간에서도 효율적인 조향 굴착이 가능하며, 도시 인프라 및 환경 엔지니어링 분야에서 새로운 가능성을 제시할 것으로 기대된다.
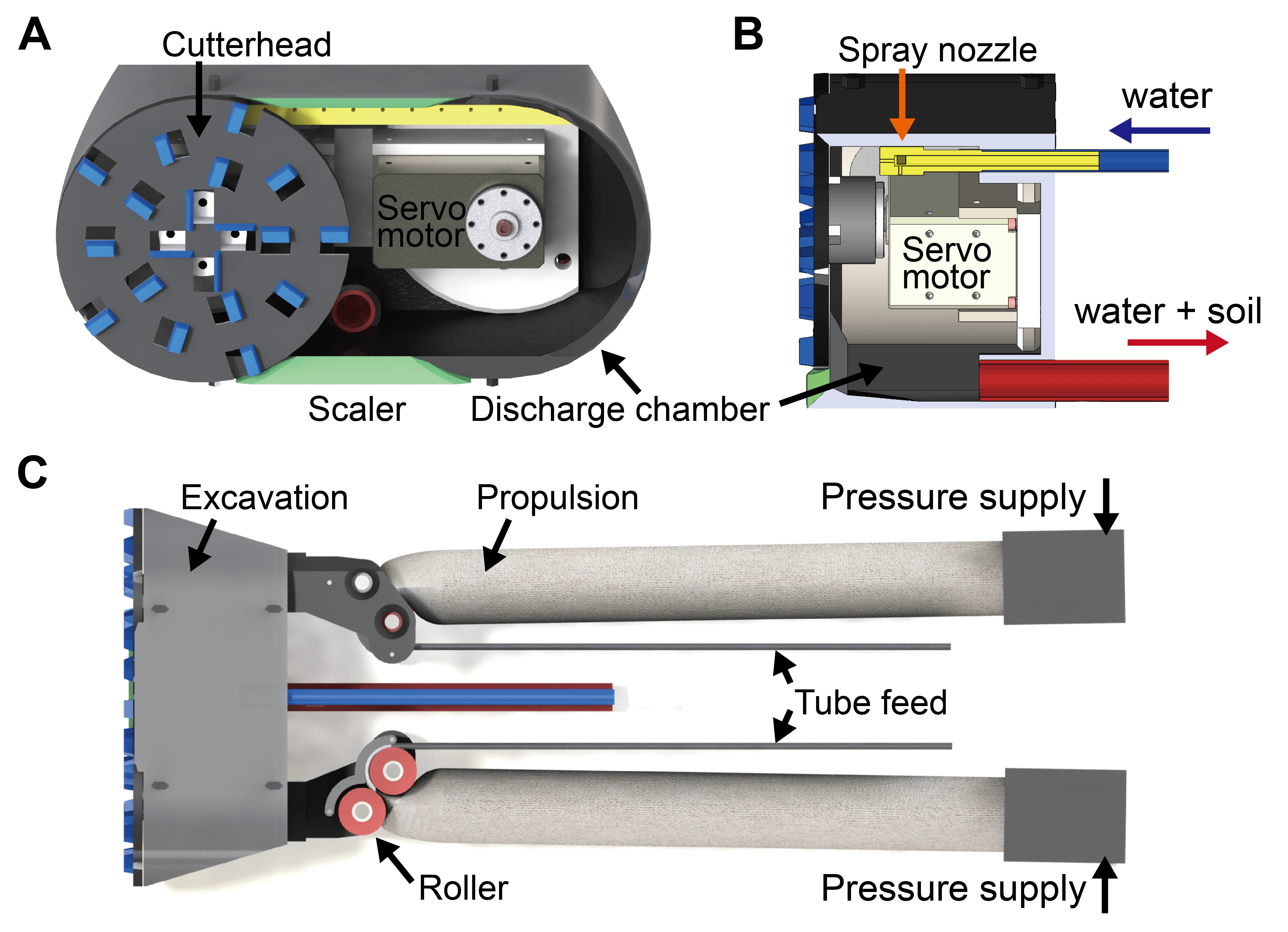
RootBot 프로토타입에는 고곡률 조향 굴착에 반드시 필요한 추진, 굴착, 배토 모듈이 포함되어 있다 (그림 2). 굴착 모듈은 나란히 배치된 두개의 커터헤드(직경 10cm)와 구동을 위해 필요한 두개의 서보 모터를 가지고 있다 (그림 2A). TBM(터널 보링 머신)에서 사용되는 커터헤드를 모방한 RootBot의 커터헤드는 다양한 토양에서 굴착이 가능하도록 설계되었다. 배토 모듈은 커터헤드가 굴착한 흙에 물을 주입하고 흡입 펌프를 이용하여 물과 굴착토를 함께 회수하여 RootBot이 멈추지 않고 지속적으로 굴착할 수 있게 해준다 (그림 2B). 추진 모듈은 두개의 튜브를 사용하며, 각각의 튜브에 공급되는 압력을 독립적으로 제어할 수 있다 (그림 2C). 추진 모듈에 사용된 부드럽고 유연한 플라스틱 튜브는 RootBot이 제한된 환경에서도 안정적인 추진력을 받으며 이동할 수 있게 해준다.
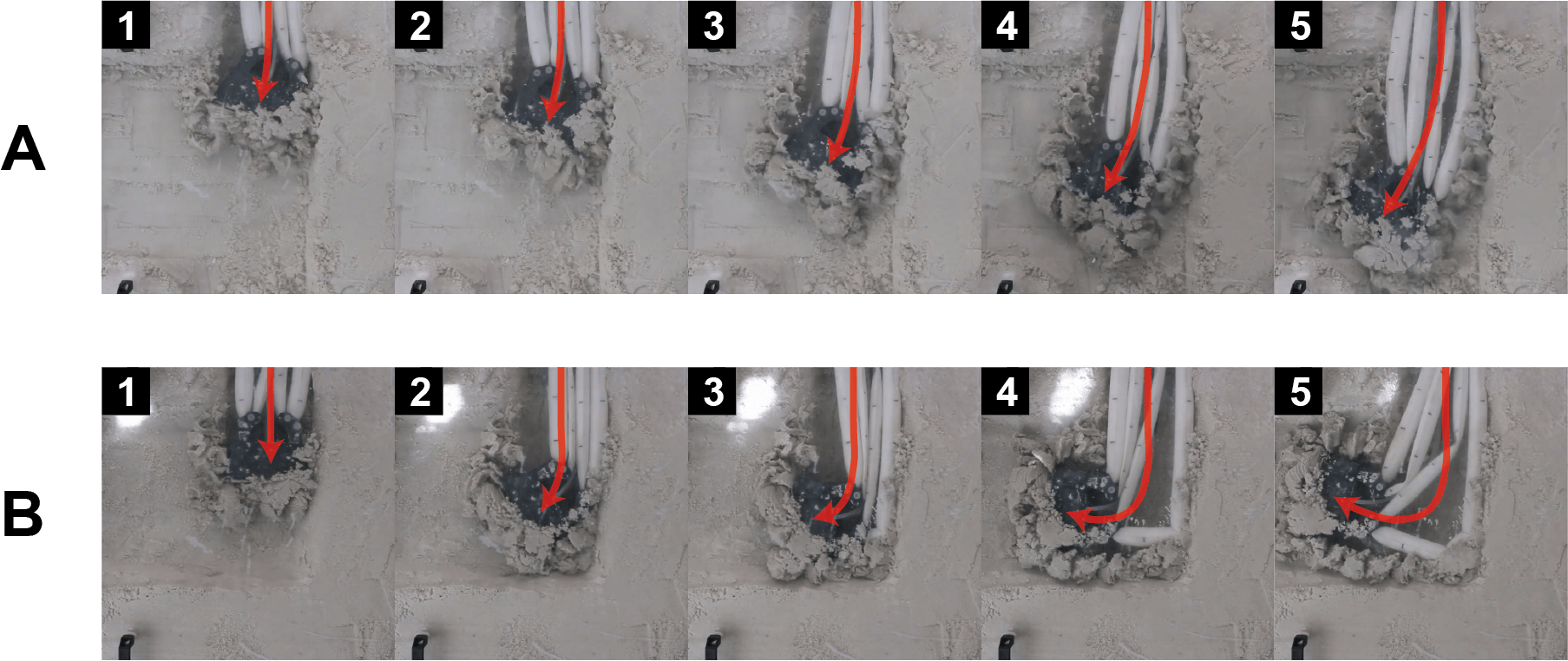
RootBot 프로토타입의 굴착 성능을 확인하기 위하여 토조, 공압펌프, 서보 모터 제어기, 진공펌프, 등으로 구성된 실험 환경을 조성하였다. 커터헤드의 회전 속도를 30RPM으로 고정한 저곡률 조향 굴착 실험에서 RootBot의 진행 방향이 41도까지 점진적으로 꺾이는 것을 확인할 수 있었다 (그림 3A). 추진 모듈을 구성하는 두 유연튜브에 공급되는 압력 차이를 50Kpa 이상으로 고정하여 진행된 고곡률 조향 굴착 실험에서는 RootBot의 진행 방향이 최종적으로 90도 넘게 꺾이는 것을 확인할 수 있었다 (그림 3B). 이때의 굴착 곡률 반경은 약 42cm였으며, 굴착 모듈에 비하여 약 2.1배 큰 크기이다.
식물 뿌리의 성장 메커니즘을 모방한 RootBot은 기존의 굴착 방식으로는 어려웠던 고곡률 조향 굴착을 통하여 제한된 공간에서의 탐사 및 작업에 대한 새로운 가능성을 제시하였다. 다져진 젖은 모래에서의 굴착 실험을 통하여 RootBot 프로토타입이 이러한 환경에서 0.82mm/min 속도로 굴착 가능한 것을 확인하였으며, 저곡률 뿐만 아니라 고곡률 조향 굴착이 가능한 것을 확인할 수 있었다. RootBot의 예상 활용 분야로는 제한된 공간에서의 정밀 굴착, 미리 관측하기 어려운 장애물들에 대한 극복이 필요한 탐사 작업, 고곡률 조향 굴착 작업, 등이 있다. 이 연구는 국제 학술지인 Acta Geotechnica에 게재 되었다.
Han, G., Seo, D., Ryu, JH. et al. RootBot: root-inspired soft-growing robot for high-curvature directional excavation. Acta Geotech. (2023). https://doi.org/10.1007/s11440-023-02073-2